ਵਿਕਾਸ ਅਤੇ ਨਿਰਮਾਣ ਦਾ ਵਿਸ਼ਾਲ ਇਤਿਹਾਸ
ਵਿਚਾਰ ਦੀ ਉਤਪਤੀ:
ਵਾਪਸ 1974 ਵਿੱਚ ਮੈਨੂੰ ਹਾਊਸਿੰਗ ਇਲੈਕਟ੍ਰਾਨਿਕ ਪ੍ਰੋਜੈਕਟਾਂ ਲਈ ਬਕਸੇ ਬਣਾਉਣ ਦੀ ਲੋੜ ਸੀ।ਅਜਿਹਾ ਕਰਨ ਲਈ ਮੈਂ ਆਪਣੇ ਆਪ ਨੂੰ ਕੋਣ ਲੋਹੇ ਦੇ ਕੁਝ ਟੁਕੜਿਆਂ ਵਿੱਚੋਂ ਇੱਕ ਬਹੁਤ ਹੀ ਕੱਚਾ ਸ਼ੀਟਮੈਟਲ ਫੋਲਡਰ ਬਣਾਇਆ ਅਤੇ ਇੱਕ ਉਪ ਵਿੱਚ ਰੱਖਿਆ।ਘੱਟੋ ਘੱਟ ਕਹਿਣ ਲਈ ਇਹ ਵਰਤਣ ਲਈ ਬਹੁਤ ਅਜੀਬ ਸੀ ਅਤੇ ਬਹੁਤ ਬਹੁਪੱਖੀ ਨਹੀਂ ਸੀ.ਮੈਂ ਜਲਦੀ ਹੀ ਫੈਸਲਾ ਕੀਤਾ ਕਿ ਇਹ ਕੁਝ ਬਿਹਤਰ ਬਣਾਉਣ ਦਾ ਸਮਾਂ ਸੀ.
ਇਸ ਲਈ ਮੈਂ 'ਉਚਿਤ' ਫੋਲਡਰ ਬਣਾਉਣ ਬਾਰੇ ਸੋਚਿਆ.ਇੱਕ ਚੀਜ਼ ਜੋ ਮੈਨੂੰ ਚਿੰਤਤ ਸੀ ਉਹ ਸੀ ਕਿ ਕਲੈਂਪਿੰਗ ਢਾਂਚੇ ਨੂੰ ਮਸ਼ੀਨ ਦੇ ਅਧਾਰ ਨਾਲ ਜਾਂ ਤਾਂ ਸਿਰੇ ਜਾਂ ਪਿਛਲੇ ਪਾਸੇ ਬੰਨ੍ਹਿਆ ਜਾਣਾ ਸੀ ਅਤੇ ਇਹ ਕੁਝ ਚੀਜ਼ਾਂ ਦੇ ਰਾਹ ਵਿੱਚ ਆਉਣ ਵਾਲਾ ਸੀ ਜੋ ਮੈਂ ਬਣਾਉਣਾ ਚਾਹੁੰਦਾ ਸੀ.ਇਸ ਲਈ ਮੈਂ ਵਿਸ਼ਵਾਸ ਦੀ ਇੱਕ ਛਾਲ ਮਾਰੀ ਅਤੇ ਕਿਹਾ...ਠੀਕ ਹੈ, ਚਲੋ ਕਲੈਂਪਿੰਗ ਢਾਂਚੇ ਨੂੰ ਅਧਾਰ ਨਾਲ ਨਹੀਂ ਬੰਨ੍ਹਣਾ ਚਾਹੀਦਾ, ਮੈਂ ਇਹ ਕੰਮ ਕਿਵੇਂ ਕਰ ਸਕਦਾ ਹਾਂ?
ਕੀ ਉਸ ਕੁਨੈਕਸ਼ਨ ਨੂੰ ਤੋੜਨ ਦਾ ਕੋਈ ਤਰੀਕਾ ਸੀ?
ਕੀ ਤੁਸੀਂ ਕਿਸੇ ਵਸਤੂ ਨੂੰ ਇਸ ਨਾਲ ਕੁਝ ਜੋੜੇ ਬਿਨਾਂ ਫੜ ਸਕਦੇ ਹੋ?
ਇਹ ਪੁੱਛਣਾ ਇੱਕ ਹਾਸੋਹੀਣਾ ਸਵਾਲ ਜਾਪਦਾ ਸੀ ਪਰ ਇੱਕ ਵਾਰ ਜਦੋਂ ਮੈਂ ਇਸ ਤਰੀਕੇ ਨਾਲ ਪ੍ਰਸ਼ਨ ਤਿਆਰ ਕਰ ਲਿਆ ਤਾਂ ਮੈਂ ਇੱਕ ਸੰਭਾਵਿਤ ਜਵਾਬ ਲੈ ਕੇ ਆਇਆ: -
ਤੁਸੀਂ ਉਹਨਾਂ ਨਾਲ ਸਰੀਰਕ ਸਬੰਧ ਤੋਂ ਬਿਨਾਂ ਚੀਜ਼ਾਂ ਨੂੰ ਪ੍ਰਭਾਵਿਤ ਕਰ ਸਕਦੇ ਹੋ ... ਇੱਕ FIELD ਰਾਹੀਂ!
ਮੈਨੂੰ ਇਲੈਕਟ੍ਰਿਕ ਫੀਲਡ*, ਗਰੈਵਿਟੀ ਫੀਲਡ*, ਅਤੇ ਮੈਗਨੈਟਿਕ ਫੀਲਡ* ਬਾਰੇ ਪਤਾ ਸੀ।ਪਰ ਕੀ ਇਹ ਸੰਭਵ ਹੋਵੇਗਾ?ਕੀ ਇਹ ਅਸਲ ਵਿੱਚ ਕੰਮ ਕਰੇਗਾ?
(* ਇੱਕ ਪਾਸੇ ਦੇ ਤੌਰ 'ਤੇ ਇਹ ਨੋਟ ਕਰਨਾ ਦਿਲਚਸਪ ਹੈ ਕਿ ਆਧੁਨਿਕ ਵਿਗਿਆਨ ਨੇ ਅਜੇ ਪੂਰੀ ਤਰ੍ਹਾਂ ਇਹ ਸਮਝਾਉਣਾ ਹੈ ਕਿ "ਦੂਰੀ 'ਤੇ ਬਲ" ਅਸਲ ਵਿੱਚ ਕਿਵੇਂ ਕੰਮ ਕਰਦਾ ਹੈ)।

ਅੱਗੇ ਕੀ ਹੋਇਆ, ਅਜੇ ਵੀ ਇੱਕ ਸਪੱਸ਼ਟ ਯਾਦ ਹੈ.
ਮੈਂ ਆਪਣੀ ਹੋਮ ਵਰਕਸ਼ਾਪ ਵਿੱਚ ਸੀ ਅਤੇ ਅੱਧੀ ਰਾਤ ਤੋਂ ਬਾਅਦ ਅਤੇ ਸੌਣ ਦਾ ਸਮਾਂ ਸੀ, ਪਰ ਮੈਂ ਇਸ ਨਵੇਂ ਵਿਚਾਰ ਨੂੰ ਅਜ਼ਮਾਉਣ ਦੇ ਪਰਤਾਵੇ ਨੂੰ ਰੋਕ ਨਹੀਂ ਸਕਿਆ।
ਮੈਨੂੰ ਜਲਦੀ ਹੀ ਇੱਕ ਘੋੜੇ ਦੀ ਜੁੱਤੀ ਦਾ ਚੁੰਬਕ ਅਤੇ ਸ਼ਿਮ ਪਿੱਤਲ ਦਾ ਇੱਕ ਟੁਕੜਾ ਮਿਲਿਆ।ਮੈਂ ਸ਼ਿਮ ਪਿੱਤਲ ਨੂੰ ਚੁੰਬਕ ਅਤੇ ਇਸਦੇ 'ਰੱਖਿਅਕ' ਦੇ ਵਿਚਕਾਰ ਪਾ ਦਿੱਤਾ ਅਤੇ ਪਿੱਤਲ ਨੂੰ ਆਪਣੀ ਉਂਗਲ ਨਾਲ ਮੋੜਿਆ!
ਯੂਰੇਕਾ!ਇਹ ਕੰਮ ਕੀਤਾ.ਪਿੱਤਲ ਸਿਰਫ 0.09mm ਮੋਟਾ ਸੀ ਪਰ ਸਿਧਾਂਤ ਸਥਾਪਿਤ ਕੀਤਾ ਗਿਆ ਸੀ!
(ਖੱਬੇ ਪਾਸੇ ਦੀ ਫੋਟੋ ਅਸਲ ਪ੍ਰਯੋਗ ਦੀ ਮੁੜ-ਨਿਰਮਾਣ ਹੈ ਪਰ ਇਹ ਉਹੀ ਭਾਗਾਂ ਦੀ ਵਰਤੋਂ ਕਰ ਰਹੀ ਹੈ)।
ਮੈਂ ਉਤਸ਼ਾਹਿਤ ਸੀ ਕਿਉਂਕਿ ਮੈਂ ਸ਼ੁਰੂ ਤੋਂ ਹੀ ਮਹਿਸੂਸ ਕੀਤਾ ਸੀ ਕਿ ਜੇਕਰ ਇਸ ਵਿਚਾਰ ਨੂੰ ਅਮਲੀ ਰੂਪ ਵਿੱਚ ਕੰਮ ਕਰਨ ਲਈ ਬਣਾਇਆ ਜਾ ਸਕਦਾ ਹੈ ਤਾਂ ਇਹ ਸ਼ੀਟਮੈਟਲ ਬਣਾਉਣ ਦੇ ਤਰੀਕੇ ਵਿੱਚ ਇੱਕ ਨਵੀਂ ਧਾਰਨਾ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ।
ਅਗਲੇ ਦਿਨ ਮੈਂ ਆਪਣੇ ਕੰਮ ਦੇ ਸਹਿਯੋਗੀ, ਟੋਨੀ ਗ੍ਰੇਨਜਰ ਨੂੰ ਆਪਣੇ ਵਿਚਾਰਾਂ ਬਾਰੇ ਦੱਸਿਆ।ਉਹ ਥੋੜਾ ਉਤਸ਼ਾਹਿਤ ਵੀ ਸੀ ਅਤੇ ਉਸਨੇ ਮੇਰੇ ਲਈ ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ ਲਈ ਇੱਕ ਸੰਭਾਵੀ ਡਿਜ਼ਾਈਨ ਤਿਆਰ ਕੀਤਾ।ਉਸਨੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟ ਤੋਂ ਕਿਸ ਕਿਸਮ ਦੀਆਂ ਸ਼ਕਤੀਆਂ ਪ੍ਰਾਪਤ ਕੀਤੀਆਂ ਜਾ ਸਕਦੀਆਂ ਹਨ ਇਸ ਬਾਰੇ ਕੁਝ ਗਣਨਾਵਾਂ ਵੀ ਕੀਤੀਆਂ।ਟੋਨੀ ਸਭ ਤੋਂ ਚਲਾਕ ਵਿਅਕਤੀ ਸੀ ਜਿਸਨੂੰ ਮੈਂ ਜਾਣਦਾ ਸੀ ਅਤੇ ਮੈਂ ਬਹੁਤ ਖੁਸ਼ਕਿਸਮਤ ਸੀ ਕਿ ਉਸਨੂੰ ਇੱਕ ਸਹਿਕਰਮੀ ਵਜੋਂ ਮਿਲਿਆ ਅਤੇ ਉਸਦੀ ਕਾਫ਼ੀ ਮੁਹਾਰਤ ਤੱਕ ਪਹੁੰਚ ਕੀਤੀ।
ਸ਼ੁਰੂ ਵਿੱਚ ਇਹ ਲਗਦਾ ਸੀ ਕਿ ਇਹ ਵਿਚਾਰ ਸ਼ਾਇਦ ਸਿਰਫ ਸ਼ੀਟਮੈਟਲ ਦੇ ਕਾਫ਼ੀ ਪਤਲੇ ਗੇਜਾਂ ਲਈ ਕੰਮ ਕਰੇਗਾ ਪਰ ਇਹ ਮੈਨੂੰ ਅੱਗੇ ਵਧਣ ਲਈ ਉਤਸ਼ਾਹਿਤ ਕਰਨ ਲਈ ਕਾਫ਼ੀ ਵਾਅਦਾ ਕਰ ਰਿਹਾ ਸੀ।
ਸ਼ੁਰੂਆਤੀ ਵਿਕਾਸ:
ਅਗਲੇ ਕੁਝ ਦਿਨਾਂ ਵਿੱਚ ਮੈਂ ਸਟੀਲ ਦੇ ਕੁਝ ਟੁਕੜੇ, ਕੁਝ ਤਾਂਬੇ ਦੀ ਤਾਰ, ਅਤੇ ਇੱਕ ਸੁਧਾਰਕ ਪ੍ਰਾਪਤ ਕੀਤਾ ਅਤੇ ਆਪਣਾ ਪਹਿਲਾ ਇਲੈਕਟ੍ਰੋ-ਮੈਗਨੈਟਿਕ ਫੋਲਡਰ ਬਣਾਇਆ!ਮੇਰੇ ਕੋਲ ਇਹ ਅਜੇ ਵੀ ਮੇਰੀ ਵਰਕਸ਼ਾਪ ਵਿੱਚ ਹੈ:

ਇਸ ਮਸ਼ੀਨ ਦਾ ਇਲੈਕਟ੍ਰੋ-ਮੈਗਨੇਟ ਹਿੱਸਾ ਅਸਲੀ ਅਸਲੀ ਹੈ।
(ਅੱਗੇ ਦੇ ਖੰਭੇ ਅਤੇ ਝੁਕਣ ਵਾਲੀ ਬੀਮ ਨੂੰ ਇੱਥੇ ਦਿਖਾਇਆ ਗਿਆ ਸੀ, ਬਾਅਦ ਵਿੱਚ ਸੋਧਾਂ ਕੀਤੀਆਂ ਗਈਆਂ ਸਨ)।
ਹਾਲਾਂਕਿ ਇਹ ਮਸ਼ੀਨ ਕੱਚੀ ਹੈ!
ਜਿਵੇਂ ਕਿ ਮੇਰੇ ਅਸਲ ਯੂਰੇਕਾ ਪਲ ਵਿੱਚ ਕਲਪਨਾ ਕੀਤੀ ਗਈ ਹੈ, ਅਸਲ ਵਿੱਚ ਕਲੈਂਪਿੰਗ ਬਾਰ ਨੂੰ ਮਸ਼ੀਨ ਦੇ ਸਿਰੇ, ਪਿਛਲੇ ਪਾਸੇ ਜਾਂ ਕਿਤੇ ਵੀ ਜੋੜਨ ਦੀ ਲੋੜ ਨਹੀਂ ਸੀ।ਇਸ ਤਰ੍ਹਾਂ ਮਸ਼ੀਨ ਪੂਰੀ ਤਰ੍ਹਾਂ ਖੁੱਲ੍ਹੇ-ਡੁੱਲ੍ਹੇ ਅਤੇ ਖੁੱਲ੍ਹੇ ਗਲੇ ਵਾਲੀ ਸੀ।
ਪਰ ਓਪਨ-ਐਂਡ ਪਹਿਲੂ ਤਾਂ ਹੀ ਪੂਰੀ ਤਰ੍ਹਾਂ ਮਹਿਸੂਸ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ ਜੇਕਰ ਝੁਕਣ ਵਾਲੀ ਬੀਮ ਲਈ ਟਿੱਕੇ ਵੀ ਥੋੜੇ ਗੈਰ-ਰਵਾਇਤੀ ਸਨ।
ਆਉਣ ਵਾਲੇ ਮਹੀਨਿਆਂ ਵਿੱਚ ਮੈਂ ਇੱਕ ਕਿਸਮ ਦੇ ਅੱਧ-ਹਿੰਗ 'ਤੇ ਕੰਮ ਕੀਤਾ ਜਿਸ ਨੂੰ ਮੈਂ 'ਕੱਪ-ਹਿੰਗ' ਕਿਹਾ, ਮੈਂ ਇੱਕ ਬਿਹਤਰ ਪ੍ਰਦਰਸ਼ਨ ਕਰਨ ਵਾਲੀ ਮਸ਼ੀਨ (ਮਾਰਕ II) ਬਣਾਈ, ਮੈਂ ਆਸਟ੍ਰੇਲੀਅਨ ਪੇਟੈਂਟ ਦਫਤਰ ਕੋਲ ਇੱਕ ਅਸਥਾਈ ਪੇਟੈਂਟ ਸਪੈਸੀਫਿਕੇਸ਼ਨ ਦਰਜ ਕੀਤੀ ਅਤੇ ਮੈਂ ਇਸ 'ਤੇ ਵੀ ਪ੍ਰਗਟ ਹੋਇਆ। ਇੱਕ ਏਬੀਸੀ ਟੈਲੀਵਿਜ਼ਨ ਪ੍ਰੋਗਰਾਮ "ਦ ਇਨਵੈਂਟਰਜ਼" ਕਿਹਾ ਜਾਂਦਾ ਹੈ।ਮੇਰੀ ਕਾਢ ਨੂੰ ਉਸ ਹਫ਼ਤੇ ਲਈ ਜੇਤੂ ਵਜੋਂ ਚੁਣਿਆ ਗਿਆ ਸੀ ਅਤੇ ਬਾਅਦ ਵਿੱਚ ਉਸ ਸਾਲ (1975) ਲਈ ਫਾਈਨਲਿਸਟਾਂ ਵਿੱਚੋਂ ਇੱਕ ਵਜੋਂ ਚੁਣਿਆ ਗਿਆ ਸੀ।

ਖੱਬੇ ਪਾਸੇ ਮਾਰਕ II ਬੈਂਡਰ ਹੈ ਜਿਵੇਂ ਕਿ ਸਿਡਨੀ ਵਿੱਚ ਦਿ ਇਨਵੈਂਟਰਸ ਦੇ ਫਾਈਨਲ ਵਿੱਚ ਦਿਖਾਈ ਦੇਣ ਤੋਂ ਬਾਅਦ ਦਿਖਾਇਆ ਗਿਆ ਹੈ।
ਇਸ ਨੇ 'ਕੱਪ ਹਿੰਗ' ਦੇ ਵਧੇਰੇ ਵਿਕਸਤ ਸੰਸਕਰਣ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਿਵੇਂ ਕਿ ਹੇਠਾਂ ਦਿਖਾਇਆ ਗਿਆ ਹੈ:

1975 ਦੇ ਦੌਰਾਨ ਮੈਂ ਹੋਬਾਰਟ (3 ਅਗਸਤ 1975) ਵਿੱਚ ਇਨਵੈਂਟਰਜ਼ ਐਸੋਸੀਏਸ਼ਨ ਦੀ ਮੀਟਿੰਗ ਵਿੱਚ ਜਿਓਫ ਫੈਂਟਨ ਨੂੰ ਮਿਲਿਆ।ਜਿਓਫ "ਮੈਗਨਾਬੈਂਡ" ਦੀ ਕਾਢ ਵਿੱਚ ਕਾਫ਼ੀ ਦਿਲਚਸਪੀ ਰੱਖਦਾ ਸੀ ਅਤੇ ਇਸ ਨੂੰ ਨੇੜਿਓਂ ਦੇਖਣ ਲਈ ਮੀਟਿੰਗ ਤੋਂ ਬਾਅਦ ਮੇਰੇ ਸਥਾਨ 'ਤੇ ਵਾਪਸ ਆਇਆ ਸੀ।ਇਹ ਜੀਓਫ ਨਾਲ ਇੱਕ ਸਥਾਈ ਦੋਸਤੀ ਅਤੇ ਬਾਅਦ ਵਿੱਚ ਇੱਕ ਵਪਾਰਕ ਸਾਂਝੇਦਾਰੀ ਦੀ ਸ਼ੁਰੂਆਤ ਹੋਣੀ ਸੀ।
ਜਿਓਫ ਇੱਕ ਇੰਜੀਨੀਅਰਿੰਗ ਗ੍ਰੈਜੂਏਟ ਸੀ ਅਤੇ ਖੁਦ ਇੱਕ ਬਹੁਤ ਚਲਾਕ ਖੋਜੀ ਸੀ।ਉਸਨੇ ਆਸਾਨੀ ਨਾਲ ਇੱਕ ਕਬਜੇ ਵਾਲੇ ਡਿਜ਼ਾਇਨ ਦੀ ਮਹੱਤਤਾ ਨੂੰ ਦੇਖਿਆ ਜੋ ਮਸ਼ੀਨ ਨੂੰ ਇਸਦੀ ਪੂਰੀ ਖੁੱਲੀ ਸਮਰੱਥਾ ਦਾ ਅਹਿਸਾਸ ਕਰ ਸਕੇਗਾ।
ਮੇਰੇ 'ਕੱਪ ਹਿੰਗ' ਨੇ ਕੰਮ ਕੀਤਾ ਪਰ 90 ਡਿਗਰੀ ਤੋਂ ਜ਼ਿਆਦਾ ਬੀਮ ਦੇ ਕੋਣਾਂ ਲਈ ਗੰਭੀਰ ਸਮੱਸਿਆਵਾਂ ਸਨ।
ਜਿਓਫ ਨੂੰ ਕੇਂਦਰ ਰਹਿਤ ਕਬਜ਼ਿਆਂ ਵਿੱਚ ਬਹੁਤ ਦਿਲਚਸਪੀ ਹੋ ਗਈ।ਕਬਜੇ ਦੀ ਇਹ ਸ਼੍ਰੇਣੀ ਇੱਕ ਵਰਚੁਅਲ ਬਿੰਦੂ ਦੇ ਆਲੇ ਦੁਆਲੇ ਪਿਵੋਟਿੰਗ ਪ੍ਰਦਾਨ ਕਰ ਸਕਦੀ ਹੈ ਜੋ ਕਿ ਪੂਰੀ ਤਰ੍ਹਾਂ ਆਪਣੇ ਆਪ ਵਿੱਚ ਹਿੰਗ ਵਿਧੀ ਤੋਂ ਬਾਹਰ ਹੋ ਸਕਦਾ ਹੈ।
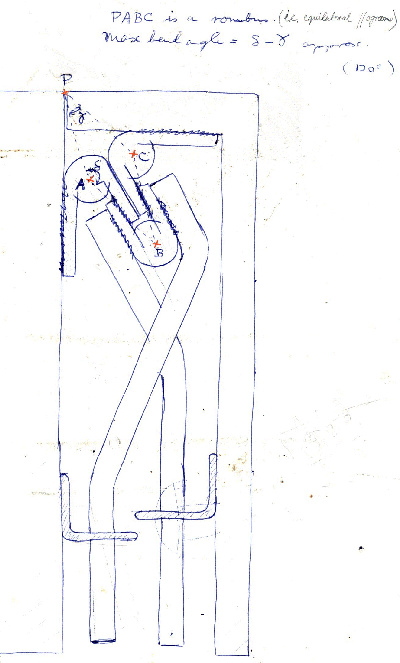
ਇੱਕ ਦਿਨ (1 ਫਰਵਰੀ 1976) ਜਿਓਫ ਇੱਕ ਅਸਾਧਾਰਨ ਅਤੇ ਨਵੀਨਤਾਕਾਰੀ ਦਿੱਖ ਵਾਲੇ ਕਬਜੇ ਦੀ ਇੱਕ ਡਰਾਇੰਗ ਲੈ ਕੇ ਆਇਆ।ਮੈਂ ਹੈਰਾਨ ਸੀ!ਮੈਂ ਇਸ ਤੋਂ ਪਹਿਲਾਂ ਕਦੇ ਵੀ ਰਿਮੋਟਲੀ ਕੁਝ ਨਹੀਂ ਦੇਖਿਆ ਸੀ!
(ਖੱਬੇ ਪਾਸੇ ਡਰਾਇੰਗ ਦੇਖੋ)।
ਮੈਂ ਸਿੱਖਿਆ ਕਿ ਇਹ 4-ਪੱਟੀ ਲਿੰਕੇਜ ਨੂੰ ਸ਼ਾਮਲ ਕਰਨ ਵਾਲਾ ਇੱਕ ਸੋਧਿਆ ਹੋਇਆ ਪੈਂਟੋਗ੍ਰਾਫ ਵਿਧੀ ਹੈ।ਅਸੀਂ ਅਸਲ ਵਿੱਚ ਕਦੇ ਵੀ ਇਸ ਕਬਜੇ ਦਾ ਸਹੀ ਸੰਸਕਰਣ ਨਹੀਂ ਬਣਾਇਆ ਪਰ ਕੁਝ ਮਹੀਨਿਆਂ ਬਾਅਦ ਜਿਓਫ ਇੱਕ ਸੁਧਾਰਿਆ ਸੰਸਕਰਣ ਲੈ ਕੇ ਆਇਆ ਜੋ ਅਸੀਂ ਬਣਾਇਆ ਸੀ।
ਸੁਧਰੇ ਹੋਏ ਸੰਸਕਰਣ ਦਾ ਇੱਕ ਕਰਾਸ ਸੈਕਸ਼ਨ ਹੇਠਾਂ ਦਿਖਾਇਆ ਗਿਆ ਹੈ:
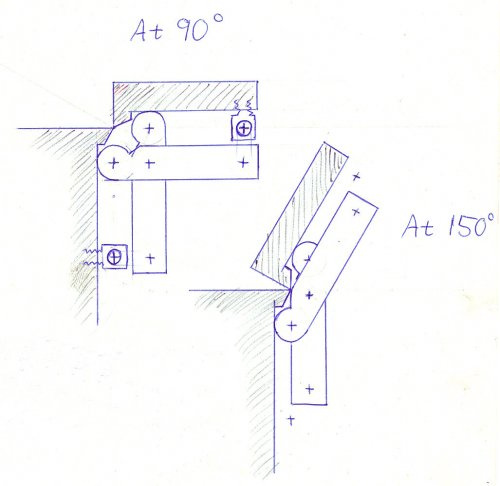
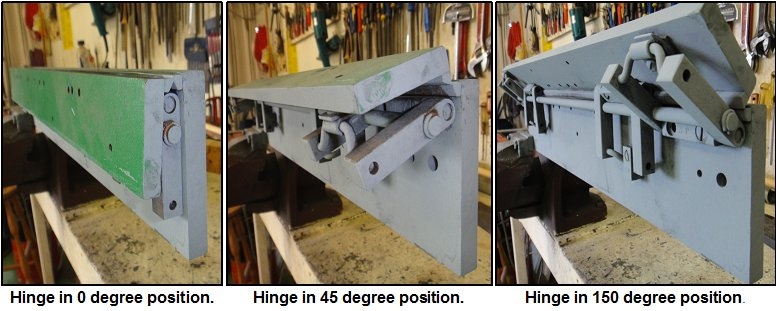
ਇਸ ਕਬਜੇ ਦੀਆਂ 'ਬਾਂਹਾਂ' ਨੂੰ ਛੋਟੀਆਂ ਕਰੈਂਕਾਂ ਦੁਆਰਾ ਮੁੱਖ ਧਰੁਵੀ ਮੈਂਬਰਾਂ ਦੇ ਸਮਾਨਾਂਤਰ ਰੱਖਿਆ ਜਾਂਦਾ ਹੈ।ਇਹਨਾਂ ਨੂੰ ਹੇਠਾਂ ਦਿੱਤੀਆਂ ਫੋਟੋਆਂ ਵਿੱਚ ਦੇਖਿਆ ਜਾ ਸਕਦਾ ਹੈ।ਕ੍ਰੈਂਕਾਂ ਨੂੰ ਕੁੱਲ ਹਿੰਜ ਲੋਡ ਦਾ ਮਾਮੂਲੀ ਪ੍ਰਤੀਸ਼ਤ ਹੀ ਲੈਣਾ ਪੈਂਦਾ ਹੈ।
ਇਸ ਵਿਧੀ ਦਾ ਇੱਕ ਸਿਮੂਲੇਸ਼ਨ ਹੇਠਾਂ ਦਿੱਤੀ ਵੀਡੀਓ ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ।(ਇਸ ਸਿਮੂਲੇਸ਼ਨ ਲਈ ਡੈਨਿਸ ਐਸਪੋ ਦਾ ਧੰਨਵਾਦ).
https://youtu.be/wKxGH8nq-tM
ਹਾਲਾਂਕਿ ਇਹ ਕਬਜ਼ ਮਕੈਨਿਜ਼ਮ ਬਹੁਤ ਵਧੀਆ ਢੰਗ ਨਾਲ ਕੰਮ ਕਰਦਾ ਹੈ, ਇਹ ਕਦੇ ਵੀ ਅਸਲ ਮੈਗਨਾਬੈਂਡ ਮਸ਼ੀਨ 'ਤੇ ਸਥਾਪਤ ਨਹੀਂ ਕੀਤਾ ਗਿਆ ਸੀ।ਇਸ ਦੀਆਂ ਕਮੀਆਂ ਇਹ ਸਨ ਕਿ ਇਹ ਝੁਕਣ ਵਾਲੀ ਬੀਮ ਦੇ ਪੂਰੇ 180 ਡਿਗਰੀ ਰੋਟੇਸ਼ਨ ਲਈ ਪ੍ਰਦਾਨ ਨਹੀਂ ਕਰਦਾ ਸੀ ਅਤੇ ਇਹ ਵੀ ਜਾਪਦਾ ਸੀ ਕਿ ਇਸ ਵਿੱਚ ਬਹੁਤ ਸਾਰੇ ਹਿੱਸੇ ਹਨ (ਹਾਲਾਂਕਿ ਬਹੁਤ ਸਾਰੇ ਹਿੱਸੇ ਇੱਕ ਦੂਜੇ ਦੇ ਸਮਾਨ ਸਨ)।
ਦੂਸਰਾ ਕਾਰਨ ਇਹ ਸੀ ਕਿ ਇਸ ਕਬਜੇ ਦੀ ਵਰਤੋਂ ਨਹੀਂ ਕੀਤੀ ਗਈ ਕਿਉਂਕਿ ਜੀਓਫ ਫਿਰ ਉਸਦੇ ਨਾਲ ਆਇਆ:
ਤ੍ਰਿਏਕਸੀਅਲ ਹਿੰਗ:
ਟ੍ਰਾਈਐਕਸੀਅਲ ਹਿੰਗ ਨੇ ਪੂਰੀ 180 ਡਿਗਰੀ ਰੋਟੇਸ਼ਨ ਪ੍ਰਦਾਨ ਕੀਤੀ ਸੀ ਅਤੇ ਇਹ ਸਰਲ ਸੀ ਕਿਉਂਕਿ ਇਸ ਨੂੰ ਘੱਟ ਹਿੱਸਿਆਂ ਦੀ ਲੋੜ ਸੀ, ਹਾਲਾਂਕਿ ਇਹ ਹਿੱਸੇ ਆਪਣੇ ਆਪ ਵਿੱਚ ਵਧੇਰੇ ਗੁੰਝਲਦਾਰ ਸਨ।
ਇੱਕ ਕਾਫ਼ੀ ਸੈਟਲ ਡਿਜ਼ਾਇਨ ਤੱਕ ਪਹੁੰਚਣ ਤੋਂ ਪਹਿਲਾਂ ਟ੍ਰਾਈਐਕਸੀਅਲ ਹਿੰਗ ਕਈ ਪੜਾਵਾਂ ਵਿੱਚੋਂ ਲੰਘਦਾ ਹੈ।ਅਸੀਂ ਵੱਖ-ਵੱਖ ਕਿਸਮਾਂ ਨੂੰ ਟਰੂਨੀਅਨ ਹਿੰਗ, ਗੋਲਾਕਾਰ ਅੰਦਰੂਨੀ ਹਿੰਗ ਅਤੇ ਗੋਲਾਕਾਰ ਬਾਹਰੀ ਹਿੰਗ ਕਹਿੰਦੇ ਹਾਂ।
ਗੋਲਾਕਾਰ ਬਾਹਰੀ ਕਬਜ਼ ਨੂੰ ਹੇਠਾਂ ਦਿੱਤੇ ਵੀਡੀਓ ਵਿੱਚ ਸਿਮੂਲੇਟ ਕੀਤਾ ਗਿਆ ਹੈ (ਇਸ ਸਿਮੂਲੇਸ਼ਨ ਲਈ ਜੇਸਨ ਵਾਲਿਸ ਦਾ ਧੰਨਵਾਦ):
https://youtu.be/t0yL4qIwyYU
ਇਹ ਸਾਰੇ ਡਿਜ਼ਾਈਨ US ਪੇਟੈਂਟ ਸਪੈਸੀਫਿਕੇਸ਼ਨ ਦਸਤਾਵੇਜ਼ (PDF) ਵਿੱਚ ਵਰਣਿਤ ਹਨ।
ਮੈਗਨਾਬੈਂਡ ਹਿੰਗ ਨਾਲ ਸਭ ਤੋਂ ਵੱਡੀ ਸਮੱਸਿਆ ਇਹ ਸੀ ਕਿ ਇਸ ਨੂੰ ਪਾਉਣ ਲਈ ਕਿਤੇ ਵੀ ਨਹੀਂ ਸੀ!
ਮਸ਼ੀਨ ਦੇ ਸਿਰੇ ਬਾਹਰ ਹਨ ਕਿਉਂਕਿ ਅਸੀਂ ਚਾਹੁੰਦੇ ਹਾਂ ਕਿ ਮਸ਼ੀਨ ਓਪਨ-ਐਂਡ ਹੋਵੇ, ਇਸ ਲਈ ਇਸਨੂੰ ਕਿਤੇ ਹੋਰ ਜਾਣਾ ਪਵੇਗਾ।ਝੁਕਣ ਵਾਲੀ ਬੀਮ ਦੇ ਅੰਦਰਲੇ ਚਿਹਰੇ ਅਤੇ ਚੁੰਬਕ ਦੇ ਅਗਲੇ ਖੰਭੇ ਦੇ ਬਾਹਰੀ ਚਿਹਰੇ ਦੇ ਵਿਚਕਾਰ ਅਸਲ ਵਿੱਚ ਕੋਈ ਥਾਂ ਨਹੀਂ ਹੈ।
ਜਗ੍ਹਾ ਬਣਾਉਣ ਲਈ ਅਸੀਂ ਝੁਕਣ ਵਾਲੀ ਬੀਮ ਅਤੇ ਅਗਲੇ ਖੰਭੇ 'ਤੇ ਬੁੱਲ੍ਹ ਪ੍ਰਦਾਨ ਕਰ ਸਕਦੇ ਹਾਂ ਪਰ ਇਹ ਬੁੱਲ੍ਹ ਝੁਕਣ ਵਾਲੀ ਬੀਮ ਦੀ ਤਾਕਤ ਅਤੇ ਚੁੰਬਕ ਦੀ ਕਲੈਂਪਿੰਗ ਫੋਰਸ ਨਾਲ ਸਮਝੌਤਾ ਕਰਦੇ ਹਨ।(ਤੁਸੀਂ ਇਹਨਾਂ ਬੁੱਲ੍ਹਾਂ ਨੂੰ ਉਪਰੋਕਤ ਪੈਂਟੋਗ੍ਰਾਫ ਹਿੰਗ ਦੀਆਂ ਫੋਟੋਆਂ ਵਿੱਚ ਦੇਖ ਸਕਦੇ ਹੋ)।
ਇਸ ਤਰ੍ਹਾਂ ਹਿੰਗ ਦਾ ਡਿਜ਼ਾਈਨ ਪਤਲੇ ਹੋਣ ਦੀ ਜ਼ਰੂਰਤ ਦੇ ਵਿਚਕਾਰ ਸੀਮਤ ਹੈ ਤਾਂ ਜੋ ਸਿਰਫ ਛੋਟੇ ਬੁੱਲ੍ਹਾਂ ਦੀ ਜ਼ਰੂਰਤ ਹੋਏਗੀ ਅਤੇ ਮੋਟੇ ਹੋਣ ਦੀ ਜ਼ਰੂਰਤ ਹੈ ਤਾਂ ਜੋ ਇਹ ਕਾਫ਼ੀ ਮਜ਼ਬੂਤ ਹੋਵੇ.ਅਤੇ ਇਹ ਵੀ ਕੇਂਦਰ ਰਹਿਤ ਹੋਣ ਦੀ ਜ਼ਰੂਰਤ ਹੈ ਤਾਂ ਜੋ ਇੱਕ ਵਰਚੁਅਲ ਧੁਰੀ ਪ੍ਰਦਾਨ ਕੀਤੀ ਜਾ ਸਕੇ, ਤਰਜੀਹੀ ਤੌਰ 'ਤੇ ਚੁੰਬਕ ਦੀ ਕਾਰਜ-ਸਤਹ ਤੋਂ ਬਿਲਕੁਲ ਉੱਪਰ।
ਇਹ ਲੋੜਾਂ ਬਹੁਤ ਉੱਚੇ ਕ੍ਰਮ ਦੇ ਬਰਾਬਰ ਸਨ, ਪਰ ਜਿਓਫ ਦੇ ਬਹੁਤ ਹੀ ਖੋਜੀ ਡਿਜ਼ਾਈਨ ਨੇ ਲੋੜਾਂ ਨੂੰ ਚੰਗੀ ਤਰ੍ਹਾਂ ਸੰਬੋਧਿਤ ਕੀਤਾ, ਹਾਲਾਂਕਿ ਸਭ ਤੋਂ ਵਧੀਆ ਸਮਝੌਤਾ ਲੱਭਣ ਲਈ ਬਹੁਤ ਸਾਰੇ ਵਿਕਾਸ ਕਾਰਜ (ਘੱਟੋ-ਘੱਟ 10 ਸਾਲਾਂ ਤੋਂ ਵੱਧ) ਦੀ ਲੋੜ ਸੀ।
ਜੇਕਰ ਬੇਨਤੀ ਕੀਤੀ ਜਾਵੇ ਤਾਂ ਮੈਂ ਕਬਜ਼ਿਆਂ ਅਤੇ ਉਨ੍ਹਾਂ ਦੇ ਵਿਕਾਸ 'ਤੇ ਇੱਕ ਵੱਖਰਾ ਲੇਖ ਲਿਖ ਸਕਦਾ ਹਾਂ ਪਰ ਹੁਣ ਲਈ ਅਸੀਂ ਇਤਿਹਾਸ ਵੱਲ ਵਾਪਸ ਜਾਵਾਂਗੇ:
ਨਿਰਮਾਣ-ਅਧੀਨ-ਲਾਇਸੈਂਸ ਸਮਝੌਤੇ:
ਆਉਣ ਵਾਲੇ ਸਾਲਾਂ ਵਿੱਚ ਅਸੀਂ "ਨਿਰਮਾਣ-ਅੰਡਰ-ਲਾਈਸੈਂਸ" ਸਮਝੌਤਿਆਂ 'ਤੇ ਹਸਤਾਖਰ ਕੀਤੇ ਹਨ:
6 ਫਰਵਰੀ 1976: ਨੋਵਾ ਮਸ਼ੀਨਰੀ Pty ਲਿਮਿਟੇਡ, ਓਸਬੋਰਨ ਪਾਰਕ, ਪਰਥ ਪੱਛਮੀ ਆਸਟ੍ਰੇਲੀਆ।
31 ਦਸੰਬਰ 1982: ਥੈਲਮੈਨ ਕੰਸਟ੍ਰਕਸ਼ਨ ਏਜੀ, ਫਰਾਊਨਫੀਲਡ, ਸਵਿਟਜ਼ਰਲੈਂਡ।
12 ਅਕਤੂਬਰ 1983: ਰੋਪਰ ਵਿਟਨੀ ਕੋ, ਰੌਕਫੋਰਡ, ਇਲੀਨੋਇਸ, ਅਮਰੀਕਾ।
ਦਸੰਬਰ 1, 1983: ਜੋਰਗ ਮਸ਼ੀਨ ਫੈਕਟਰੀ, ਐਮਰਸਫੋਰਟ, ਹਾਲੈਂਡ
(ਜੇਕਰ ਕਿਸੇ ਦਿਲਚਸਪੀ ਰੱਖਣ ਵਾਲੀ ਧਿਰ ਦੁਆਰਾ ਬੇਨਤੀ ਕੀਤੀ ਜਾਂਦੀ ਹੈ ਤਾਂ ਹੋਰ ਇਤਿਹਾਸ)।